
We will be releasing in a few weeks the first version of MAVPilot. This is a “Ground Control Station for your Pocket”. Its target audience is iPhone users (iPad version will come later). Pilots often fly unaccompanied and this can make it difficult to use a laptop at the same time. This is more so when a pilot is using a semi-auto mode like Alt-Hold. Using your iPhone instead is a great way to keep focused on the MAV and still have all the useful information in reach. With inbuilt text-to-speech support your iPhone will let you know instantly the status and if anything starts to go wrong.
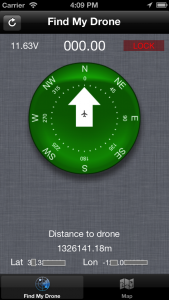
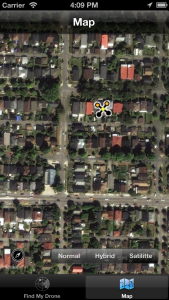
MAVPilot will incorporate the FIND MY DRONE feature.
Features Targeted for V1.0 of MAVPilot
- Telemetry Screen showing flight information e.g
- Speed
- Altitude
- Yaw
- Rate of Climb
- Battery Voltage
- Battery Remaining %
- GPS accuracy
- Throttle %
- Mode Control e.g.
- Auto
- Stabilize
- Alt Hold
- Land
- RTL
- Loiter
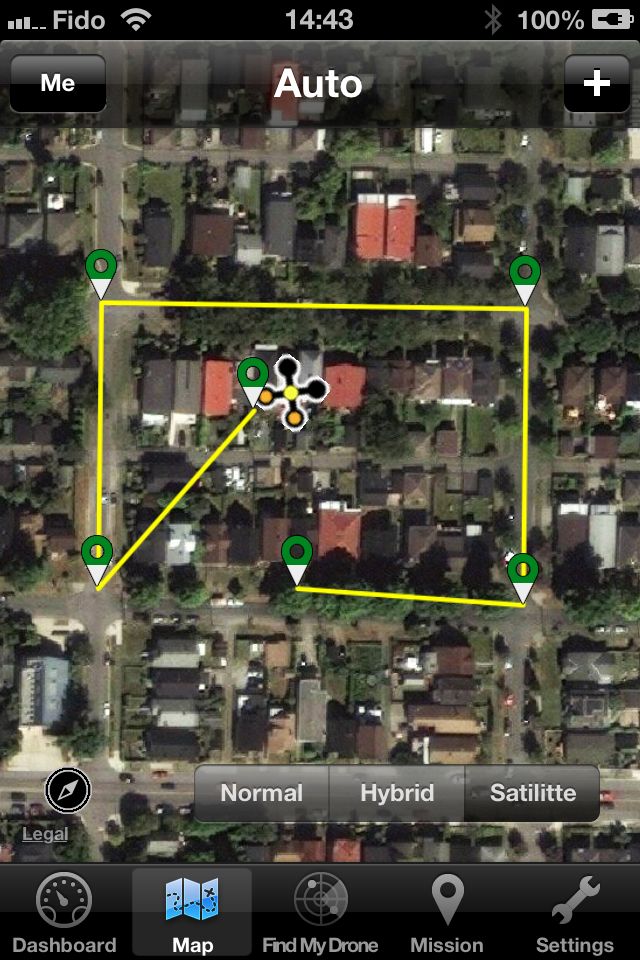
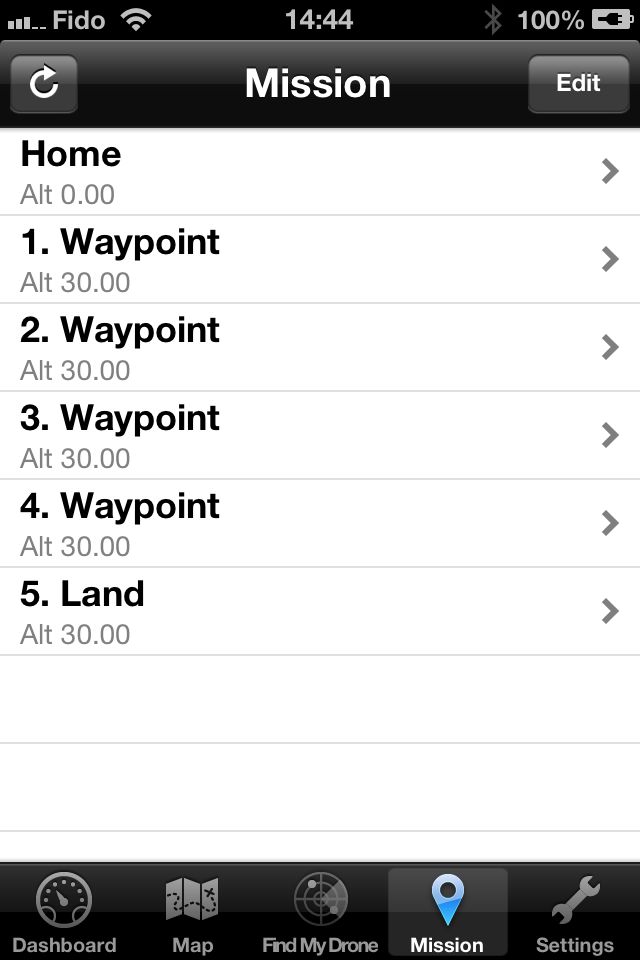
- Map View with Mission outline
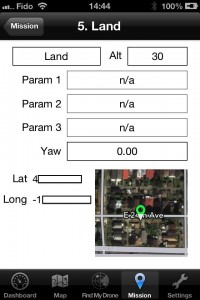
- Mission Waypoint editor
- includes waypoint parameter editing
- Configuration
- Calibration for level
- Commonly used parameter editing
- Tuning of common parameters
The app is also compatible with Bluetooth Low Energy link to a long range radio like 3DR 915/433MHz Telemetry Radio. Details to follow soon.
Compatibility: ArduPilot (other MAVLink compatible products will be added at a later date)
To sign-up has a Alpha/Beta tester please use this link